[코스모스 1주차] ROS 소개 및 설치
Chapter1. 로봇 소프트웨어 플랫폼
1. 로봇 소프트웨어 플랫폼이 가져올 미래
- 하드웨어 플랫폼과의 소프트웨어 플랫폼간의 인터페이스 확립
- 모듈형 하드위어 플랫폼 확산
- 하드웨어에 대한 지식이 없어도 응용 프로그램 작성 가능
- 더 많은 소프트웨어 인력들이 로보틱스 분야로 진입, 로봇 제품에 참여 가능
- 유저에게 제공할 서비스에 집중
- 실수요가 있는 서비스 제공으로 유저계층 형성 및 피드백
- 로봇 개발이 급속도로 발전할 수 있는 계기

Chapter2. 로봇 운영체제 ROS
1. ROS?
- ROS = Robot Operating System
- ROS Is an open-source, meta-operation system for your robot.
- ROS는 메타운영체제
메타운영체제?
어플리케이션과 분산 컴퓨팅 자원간의 가상화 레이어로 분산 컴퓨팅 자원을 활용하여, 스케줄링 및 로드, 감시, 에러 처리 등을 실행하는 시스템이라고 볼 수 있음.
2. 소프트웨어 프레임 워크
- 노드간에 메시지 교환 방법으로 복잡한 프로그램을 잘게 나눠 공동 개발 가능
- 명령어 도구, 시각화 도구 Rviz, GUI 도구 모음 rqt, 3차원 시뮬레이터 Gazebo 지원
- 로보틱스에서 많이 사용되는 모델링, 센싱, 인식, 내비게이션, 매니퓰레이션 기능 지원
3. ROS를 사용 가능한 운영체제
- Ubuntu
- OS X
- Windows
- Fedora
- Gentoo
- OpenSUSE
- Debian
- Raspbian
- Arch
- QNX Realtime OS
. . . 그래서 우리는 Ubuntu 운영체제에서 ROS를 설치할 것이다.
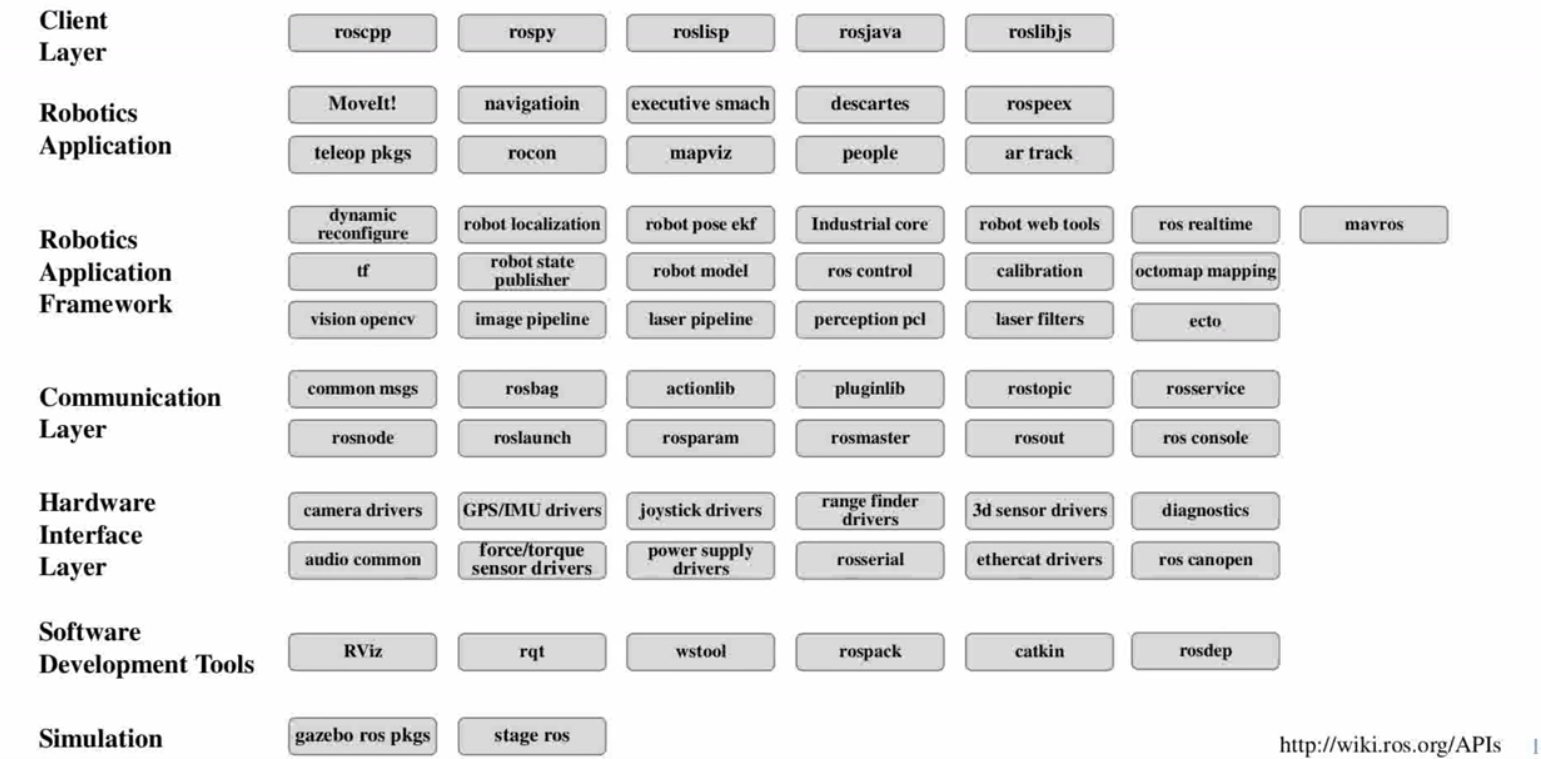
4. ROS 구성
ROS 구성은 다음과 같다.
5. ROS 특징
- 통신 인프라 (메시지 파싱, 메시지의 기록 및 재생, 메시지 사용으로 인한 다양한 프로그래밍 언어 사용, 분산 매개 변수 시스템)
- 로봇 관련 다양한 기능 (로봇에 대한 표준 메시지 정의, 로봇 기하학 라이브러리, 로봇 기술 언어, 진단 시스템, 센싱/인식, 내비게이션, 매니퓰레이션)
- 다양한 개발 도구 (Command-Line Tools, RViz, RQT, Gazebo)
Chapter3. ROS 개발환경 구축
1. ROS 설치
noetic/Installation/Ubuntu - ROS Wiki
If you rely on these packages, please support OSRF. These packages are built and hosted on infrastructure maintained and paid for by the Open Source Robotics Foundation, a 501(c)(3) non-profit organization. If OSRF were to receive one penny for each downlo
wiki.ros.org
. . . 강의에서는 ROS kinetic 설치를 하지만, 우리는 noetic 버전으로 진행한다.
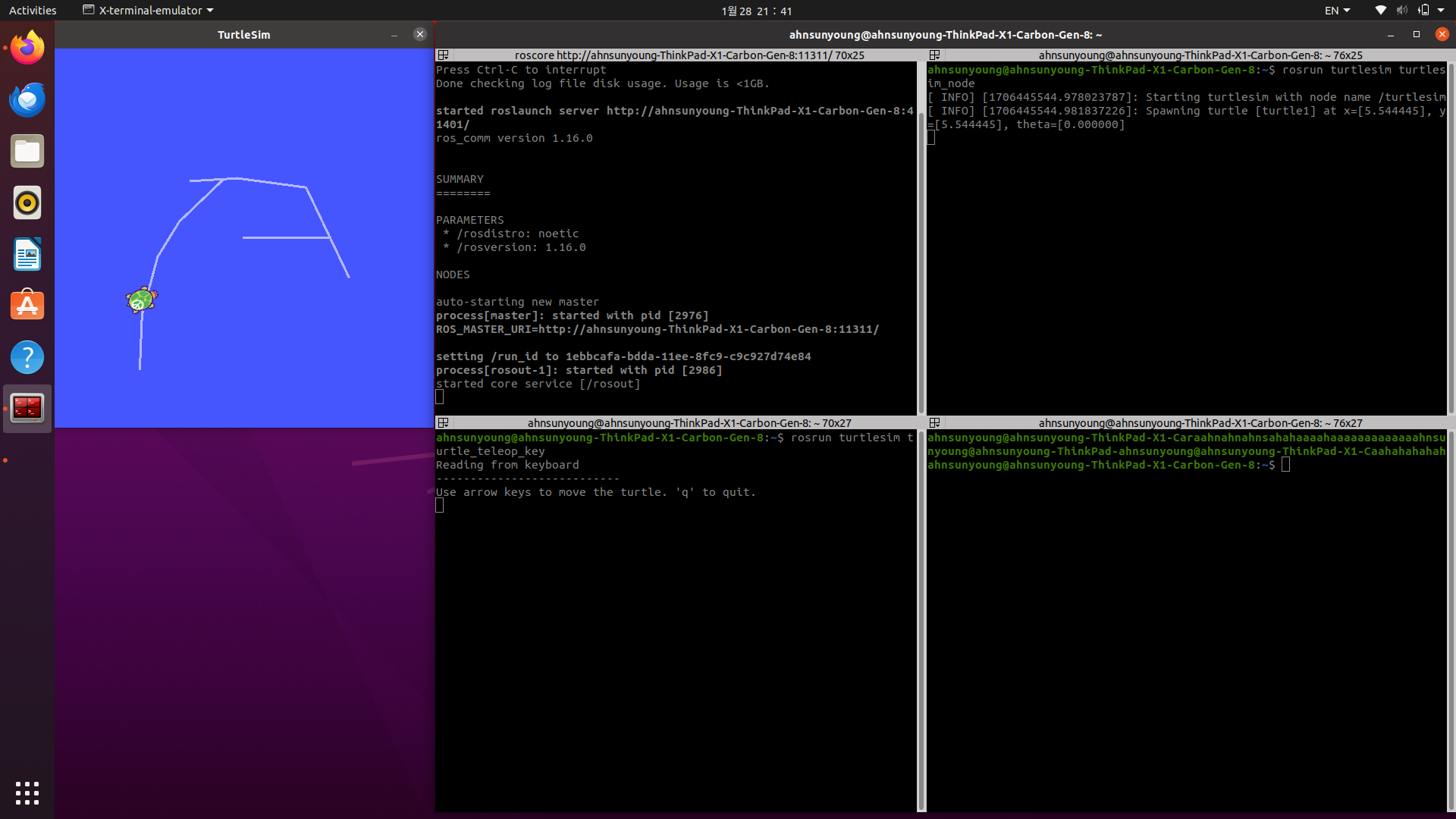
2. ROS 동작 테스트
- roscore

- rosrun turtlesim turtlesim_node

- rosrun turtlesim turtle_teleop_key
- rosrun rqt_graph rqt_graph

Terminator
ROS를 실행할 때에는 terminator가 유용하다.
sudo apt install terminator
terminator를 설치하면 Ctrl+Shift+E나 O를 누르면 창을 다음 사진과 같이 분할할 수 있다.

만일 Ctrl+Shift+E나 O를 눌러도 터미널 창 분할이 되지 않는다면,
ibus-setup
ibus-setup을 터미널에 입력하고 Emoji에 들어가 단축키를 모두 해제해준다.

출처: https://cs-kookmin-club.tistory.com/287 [KMU_SW_CLUB:티스토리]