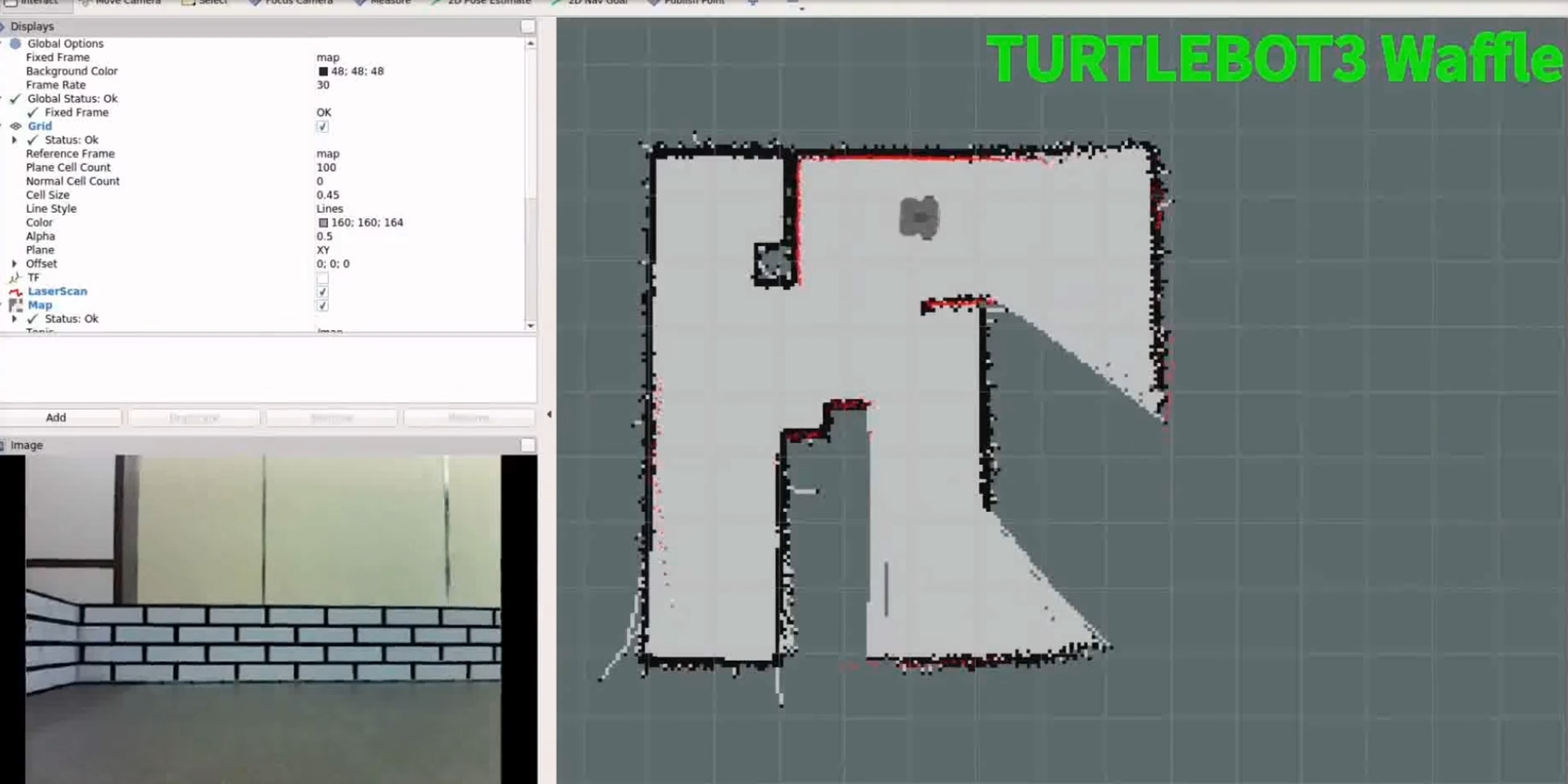
SLAM과 내비게이션
1.길 찾기에 필요한 것
- 위치 : 로봇의 위치 계측하는 기능
- GPS
- Indoor Positioning Sensor (Landmark, Indoor GPS, WiFi SLAM, Beacon)
- 추측 항법 (양 바퀴 축의 회전 값 이용)
- 데드레커닝 계산 (선속도, 각속도)
- Runge-Kutta 공식
- 센싱 : 벽, 물체 등 장애물 계측하는 기능
- 거리센서 (LRF, 초음파센서, 적외선 거리센서)
- 비전센서 (스테레오 카메라, 모노 카메라, 전 방향 옴니 카메라)
- Depth camera
- 지도 : 길과 장애물 정보가 담긴 지도
- SLAM (Simultaneous Localization And Mapping)
- 경로 : 목적지까지 최적 경로를 계산하고 주행하는 기능
- 내비게이션
- 위치 추정
- 경로 탐색/계획
- Dynamic Window Approach
- A* 알고리즘
- 포텐션 장
- 파티클 필터
- 그래프
- SLAM : 위치 + 센싱 -> 지도
- Navigation : 위치 + 센싱 + 지도 -> 경로
2. 위치 추정
- 칼만 필터
- 잡음이 포함되어 있는 선형 시스템에서 대상체의 상태를 추적하는 재귀 필터
- 베이즈 확률 기반
- 예측
- 보정
- 파티클 필터
- 시행 착오법을 기반으로한 시뮬레이션을 통하여 예측하는 기술로 대상 시스템에 확률 분포를 임의로 생성된 추정값을 파티클 입자 형태로 나타낸다
- 초기화
- 예측
- 보정
- 위치 추정
- 재추출
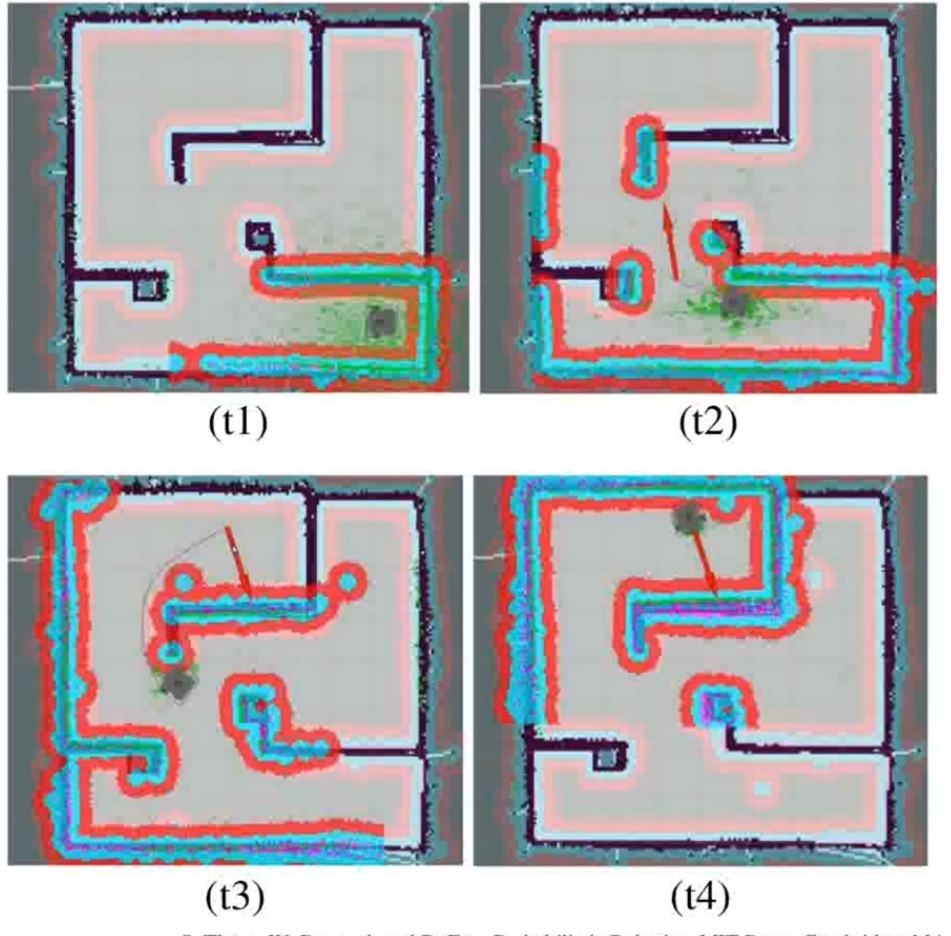
3. 내비게이션
- Dynamic Window Approach
로봇의 속도 탐색 영역에서 로봇과 충돌 가능한 장애물을 회피하면서 목표점까지 빠르게 다다를 수 있는 속도를 선택하는 방법
'ROS' 카테고리의 다른 글
| [코스모스 8주차] PKI (1) | 2024.05.09 |
|---|---|
| [코스모스 7주차] V2X (0) | 2024.05.02 |
| [코스모스 5주차] ROS 기본 프로그래밍 (0) | 2024.04.04 |
| [코스모스 3주차] ROS 명령어 및 도구 (0) | 2024.03.21 |
| [코스모스 1주차] ROS 소개 및 설치 (1) | 2024.03.07 |

